Video
Abstract
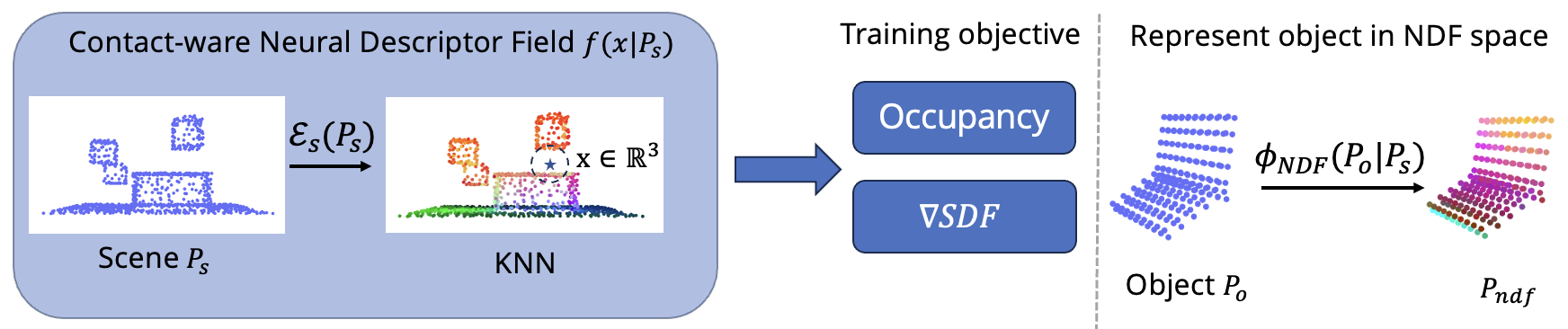
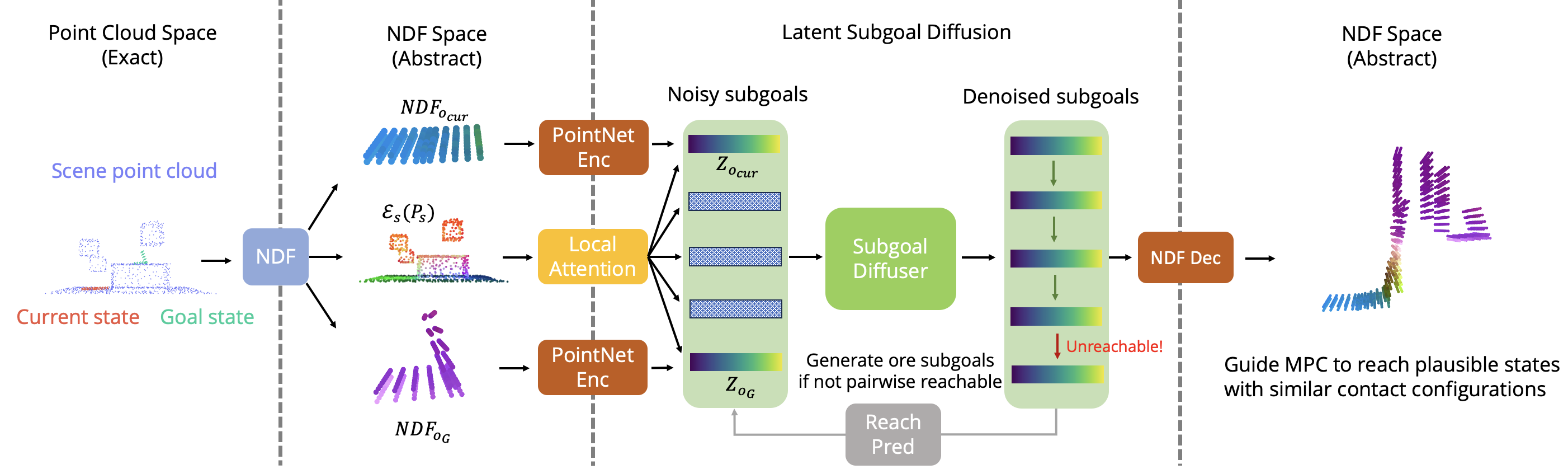
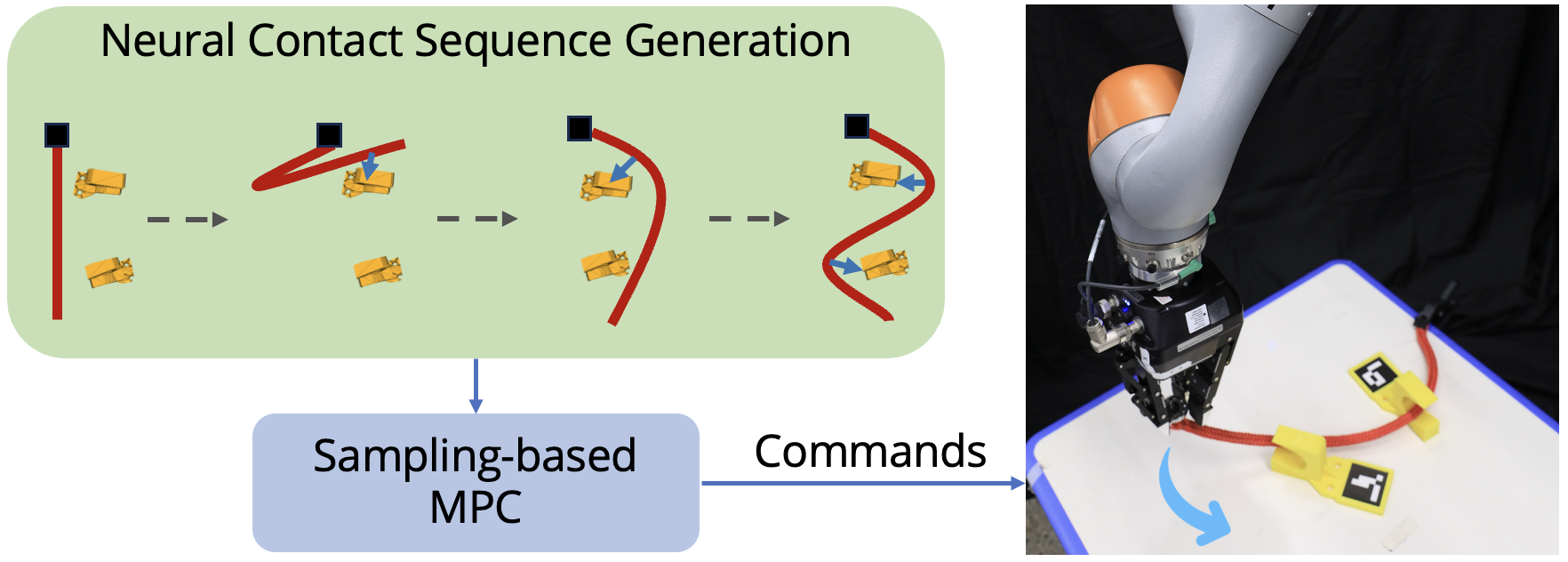
Long-horizon contact-rich manipulation has long been a challenging problem, as it requires reasoning over both discrete contact modes and continuous object motion. We introduce Implicit Contact Diffuser (ICD), a diffusion-based model that generates a sequence of neural descriptors that specify a series of contact relationships between the object and the environment. This sequence is then used as guidance for an MPC method to accomplish a given task. The key advantage of this approach is that the latent descriptors provide more task- relevant guidance to MPC, helping to avoid local minima for contact-rich manipulation tasks. Our experiments demonstrate that ICD outperforms baselines on complex, long-horizon, contact-rich manipulation tasks, such as cable routing and notebook folding. Additionally, our experiments also indicate that ICD can generalize a target contact relationship to a different environment.